mc_rtc::Configuration 設定mc_surfaces_visualizationは、ロボットの表面をRVizで表示するツールです。mc_rtc_rosパッケージに含まれています。 これは、利便性のために提供されている mc_robot_visualization のサブツールです。
ツールの起動方法は以下の通りです:
$ mc_surfaces_visualization JVRC1
mc_surfaces_visualization は mc_rtc gui のみにパブリッシュしますが、mc_surfaces_visualization_ros は mc_rtc gui と ros(RViZ)の両方にパブリッシュします。
Debian パッケージからインストールした場合、ROS 非対応バージョンは mc-rtc-utils によって提供され、ROS 対応バージョンは ros-<distro>-mc-rtc-utils によって提供されます。
プログラムの引数は MainRobot のエントリと同じものを指定します。エイリアスも扱えます。例えば
# 引数のベクトルを指定する
$ mc_surfaces_visualization_ros env `rospack find mc_env_description` ground
# またはエイリアス
$ mc_surfaces_visualization_ros env/ground
mc_rtc GUIを起動した後、これが表示されるはずです:
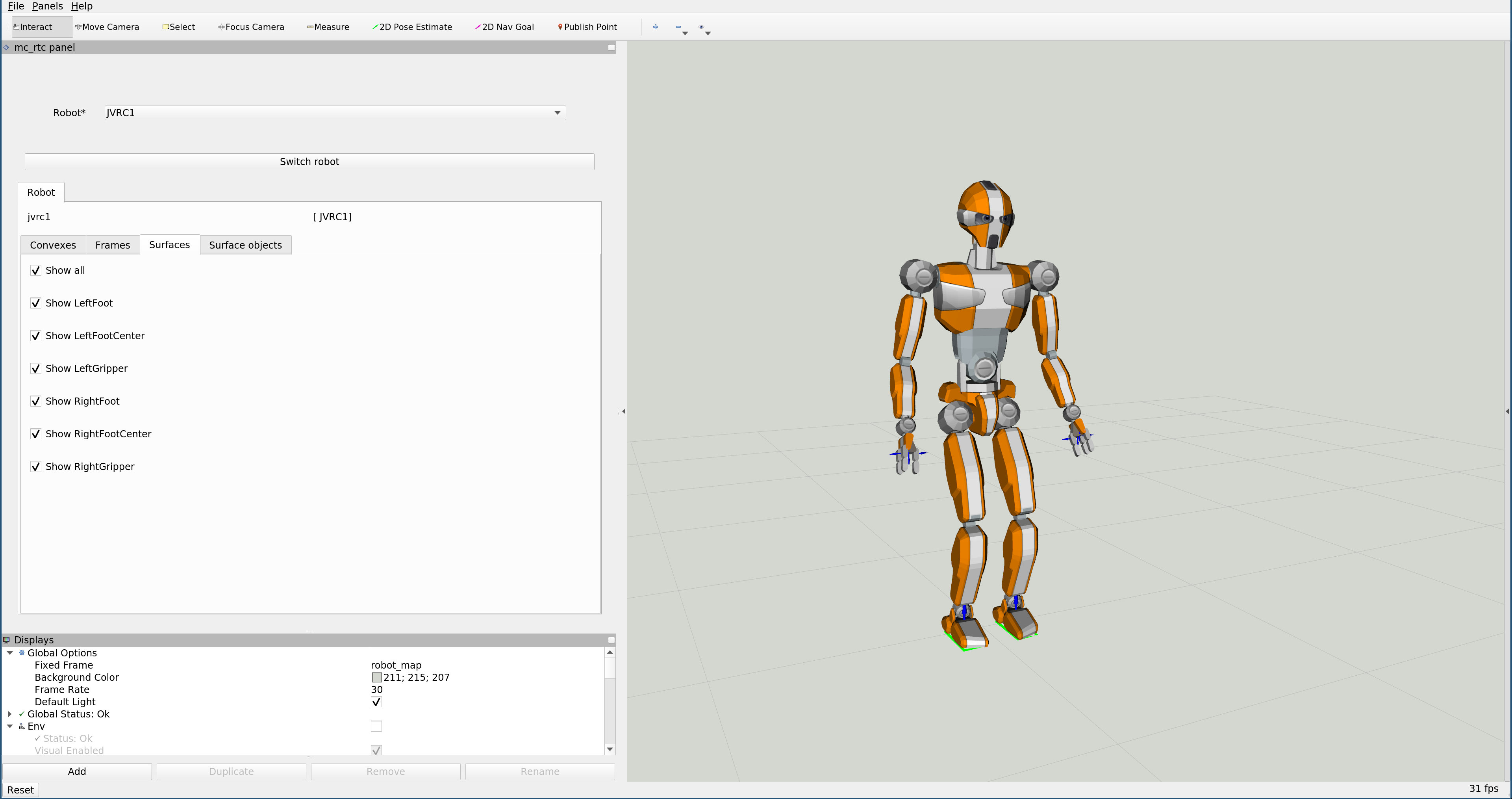
3次元表示では以下のように表示されます。
インターフェースを通じて表示する表面を簡単に選択できます